It’s long past time we derived the analytical equations for the common voting configurations. This post won’t have a ton of exposition, we are just going to get down to the work of deriving the various equations, and then finding their averages. Cataloging these will come in useful down the road, so let’s hit it.
Theoretical post about simplified Equation equation derivation
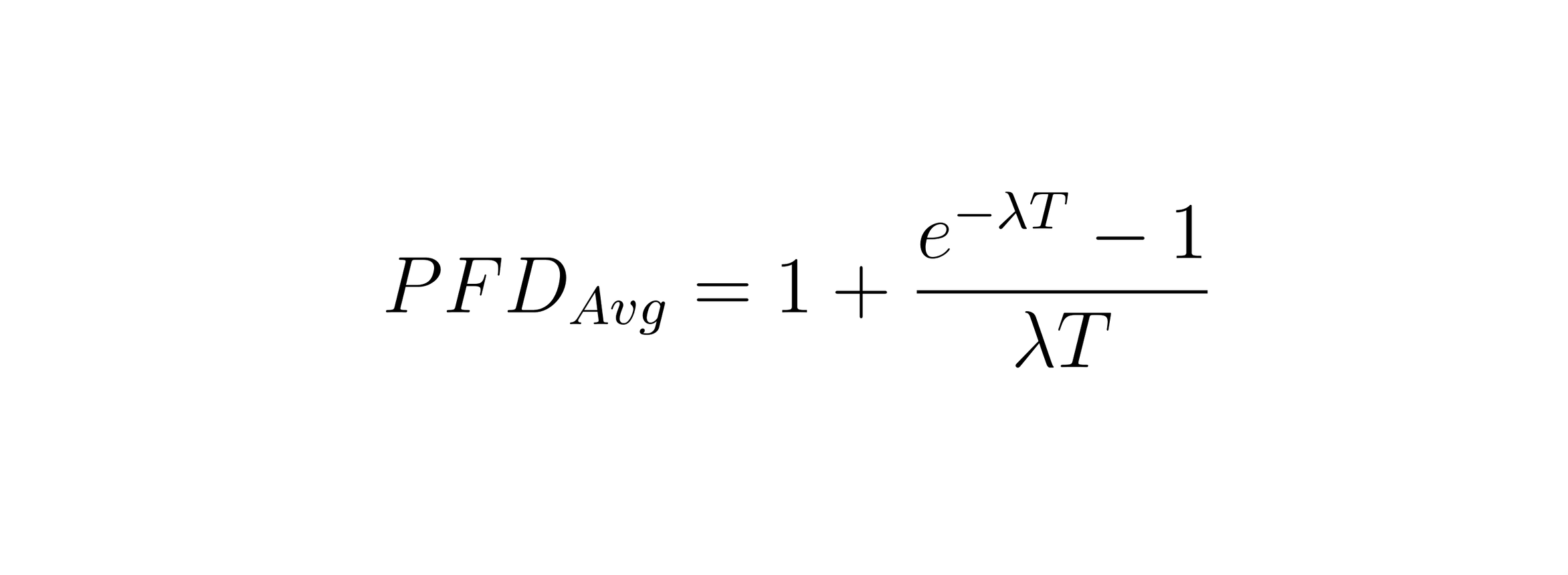
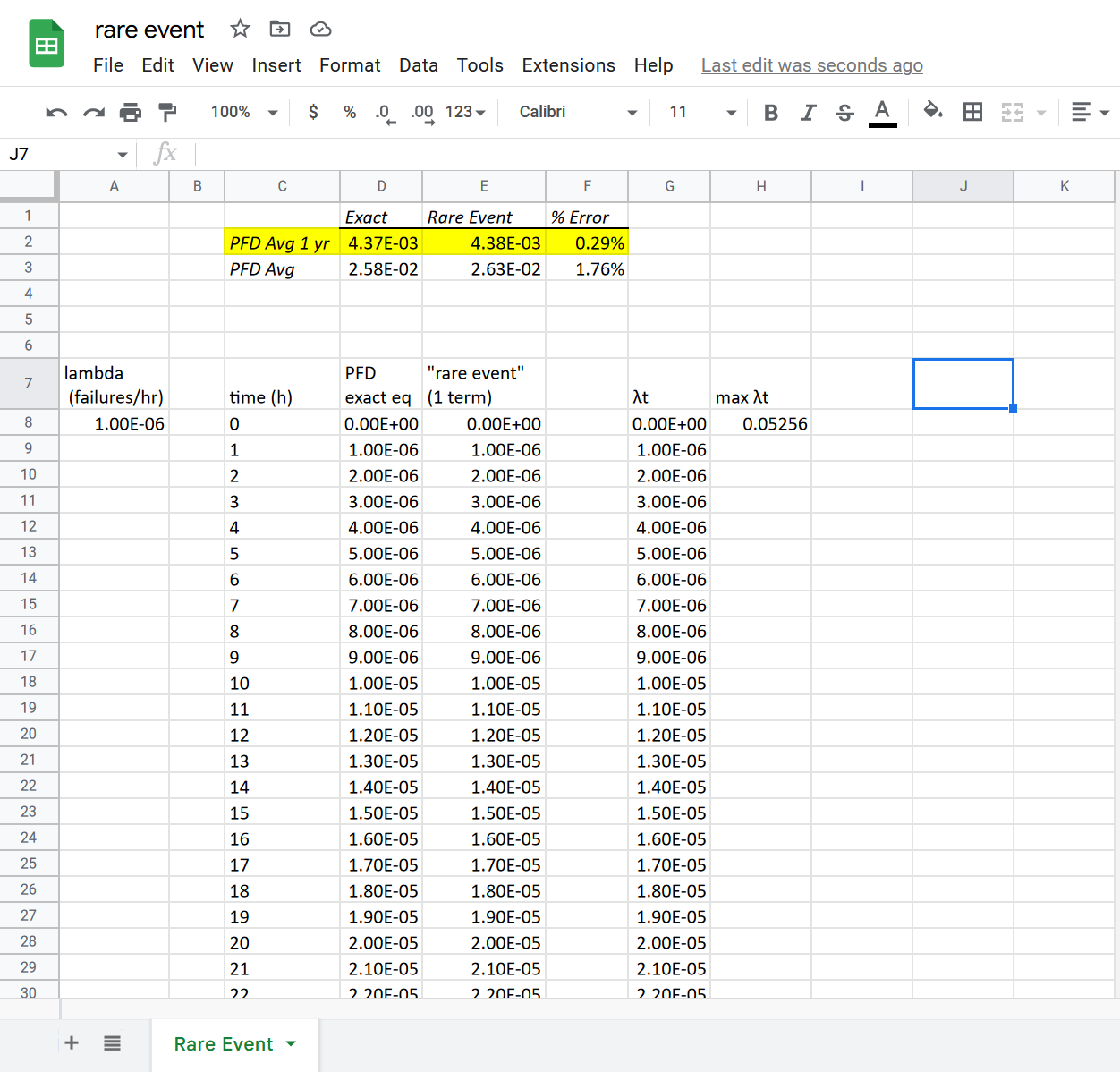
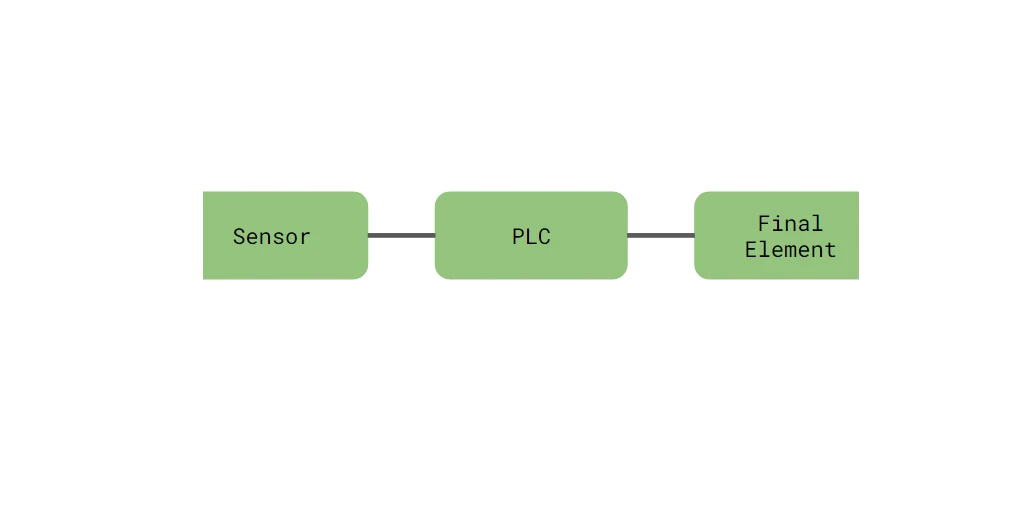
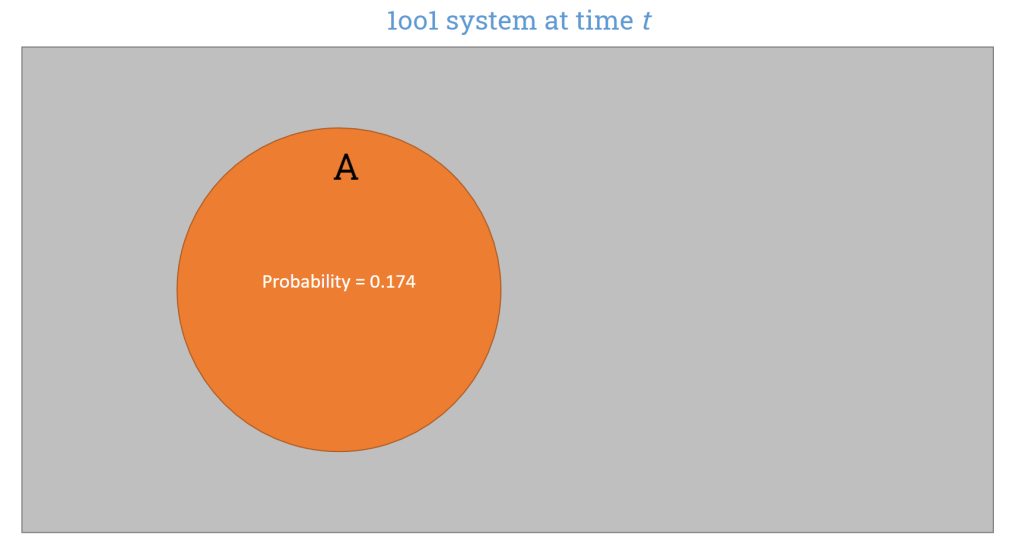
Alright, it’s finally time to talk about the simplified equations. In this post, we will start from our familiar basic equation, and discuss how to derive the simplified equation for a 1oo1 system, assuming constant failure rate.
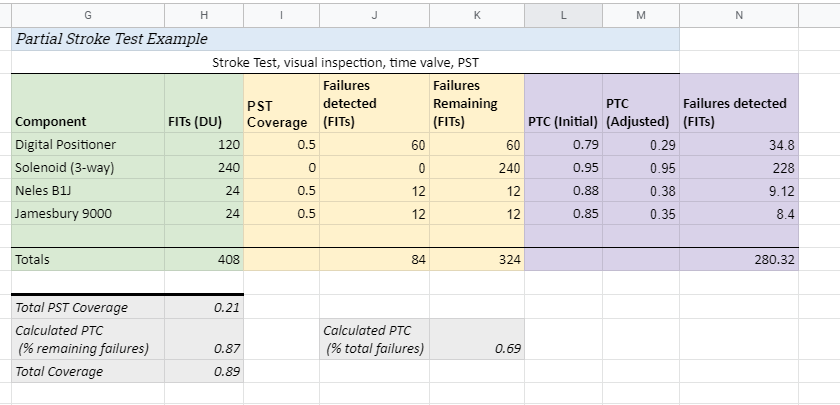
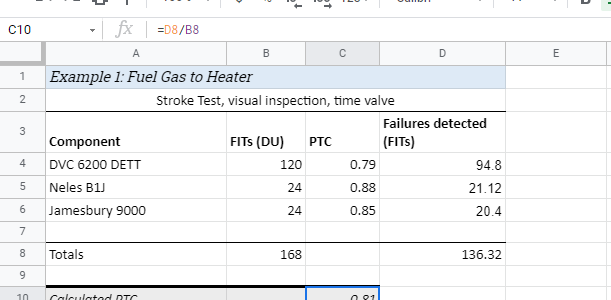
When we partial stroke test a valve, we move it a little bit (<10%), then put it back to it’s original position. The idea is to prove that the valve is functional, without interrupting the process. However, we need to figure out how to adjust our proof test coverage to account for the partial stroke test.
Finally, it is time to talk about proof test coverage calcs! Recall that when we covered how to model proof testing, we took the proof test coverage as an assumption, but no longer (kind of).
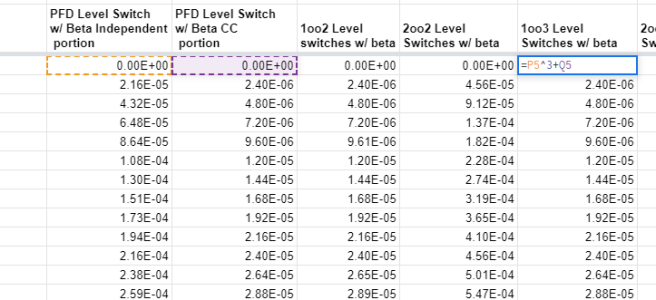
It is time, time for the final complication—well, of the introductory series anyway. Beta factors give us the ability to model dependent events, and that is the piece we need to complete our model.
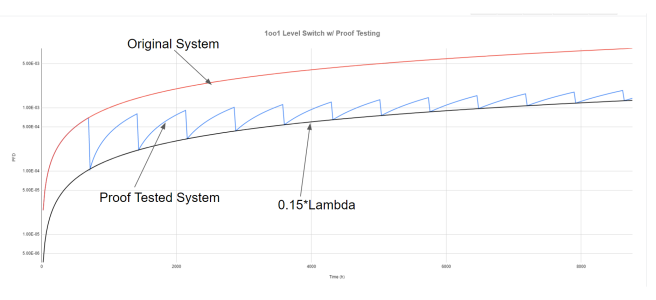
Time to complicate our lives a bit! Proof testing is essential to most safety integrity level calculations, and while the details of how to calculate proof test coverages, or how to execute good proof tests, are worthwhile topics, this post is going to focus on the nuts and bolts of modeling proof testing.
Edited 17March2023: Fixed 2oo2 comment in table to say that either device fails
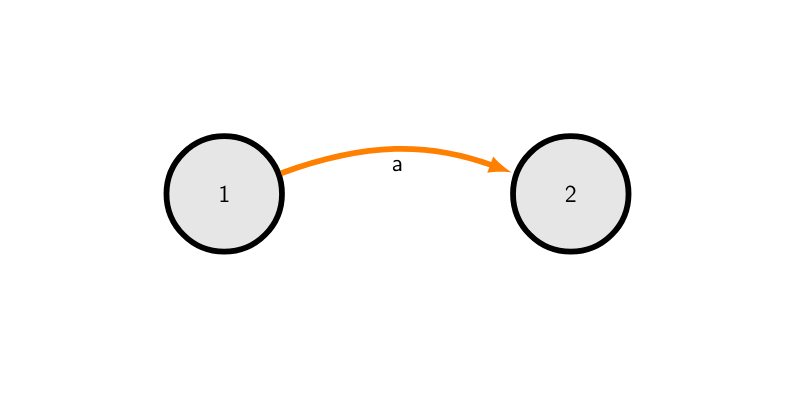
Let’s make a multiple element system, I can’t think of a better way to spend time. We’ve previously modeled a single level switch, now we will model two level switches!